Phát triển cảm biến chất lượng không khí cho máy lọc không khí
Ô nhiễm không khí với các hạt bụi mịn PM 2.5 đang trở thành vấn đề lớn và ngày càng được nhiều người quan tâm. Cảm biến PM2.5 được lắp đặt trong máy lọc không khí với nhiệm vụ đánh giá chất lượng không khí xung quanh từ đó đề xuất các giải pháp xử lý không khí hiệu quả. Tuy nhiên, bộ cảm biến thông thường chưa đủ hiệu suất để phát hiện hạt PM 2.5 với độ chính xác cao. Để tăng độ chính xác trong việc phát hiện các hạt PM 2.5, cần tăng độ nhạy đối với các hạt có quy mô nhỏ hơn và cho phép các hạt đi vào khu vực với số lượng lớn, phát hiện một cách hiệu quả. Trong quá trình phát triển này, các nhà nghiên cứu đã cho ra đời bộ cảm biến phát hiện hạt có độ chính xác cao, có thể phát hiện các hạt vi mô có đường kính 0,5μm bằng cấu trúc đường dòng với cấu trúc thu bụi và hệ thống quang học bằng cách sử dụng phương pháp tán xạ ánh sáng.
1. Giới thiệu tổng quan về máy lọc không khí
Gần đây, tác động xấu đến sức khỏe của vật chất dạng hạt mịn có đường kính 2,5 μm hoặc nhỏ hơn, được gọi là “PM2.5” đang thu hút sự chú ý của mọi người. Trong số các nguồn sinh ra PM2.5 như khói công nghiệp, khí thải xe cộ, tro núi lửa,… thì khói thuốc lá cũng là đại diện điển hình. Các hạt có trong khói thuốc lá là các vi hạt có đường kính 1 μm hoặc nhỏ hơn. Do đó, khói thuốc là được dùng để đo lường, đánh giá tính năng hút bụi cho máy lọc không khí của Hiệp hội các nhà sản xuất điện Nhật Bản.
Máy lọc không khí sử dụng các phương pháp đo vi hạt bao gồm phương pháp lọc (không khí được hút vào một bộ lọc và các chất dạng hạt được thu thập trên bộ lọc), phương pháp rung bộ lọc (thực hiện phép đo tự động) và phương pháp hấp thụ tia beta, phương pháp tán xạ ánh sáng.
Phương pháp lọc được cho là phương pháp đáng tin cậy nhất. Ngoài ra, phương pháp rung và phương pháp hấp thụ tia beta cũng được sử dụng trong hệ thống giám sát ô nhiễm không khí rộng rãi.
Tuy nhiên, các phương pháp này có quy mô rất lớn và chi phí cao nên phương pháp tán xạ ánh sáng với đặc điểm nhỏ gọn, chi phí thấp, dễ dàng kết hợp trong máy lọc không khí gia đình đã được sử dụng rộng rãi như một phương pháp quen thuộc.
Với phương pháp cảm biến phát hiện hạt, chúng nhận diện được các hạt có kích thước khoảng 1 μm tuy nhiên, điều đó cũng không thể phát hiện các vi hạt kể cả khói thuốc lá. Trong những điều kiện khác nhau, kết quả đo lường chênh lệch lớn. Do đó, nhu cầu về cảm biến phát hiện vi hạt có độ chính xác cao ngày càng tăng
2. Nguyên tắc đo lường hiệu quả
Máy lọc không khí cảm biến đo các vi hạt trong không khí bằng cách sử dụng phương pháp tán xạ ánh sáng để tìm ra các hạt đi qua cảm biến dưới dạng xung.
Như Hình 1 cho thấy, cấu trúc tổng thể của máy lọc không khí được chia thành phần dẫn truyền khí đi vào. Tại phần phát hiện các hạt bụi, ánh sáng, cường độ tán xạ, mạch khuếch đại, bộ phận xử lý tín hiệu ánh sáng và phần phóng điện các hạt kết hợp với nhau để mang đến kết quả cuối cùng.
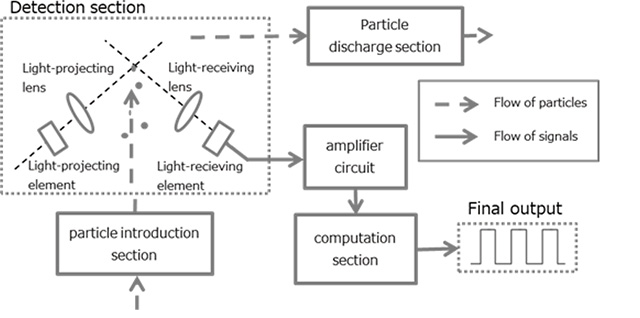
Hình 1. Sơ đồ thiết bị cảm biến chất lượng không khí
2.1 Bộ phận phát hiện
Cảm biến phát hiện hạt của máy lọc không khí hoạt động dựa trên phương pháp tán xạ ánh sáng. Các hạt bụi bị nhận dạng bằng cách phát hiện ánh sáng tán xạ được tạo ra khi phần tử chiếu ánh sáng chiếu vào các hạt đến vùng phát hiện bằng ánh sáng. Cả phần tử chiếu sáng và phần tử nhận ánh sáng đều có thấu kính phi cầu để đặt hệ thống quang học thu ánh sáng cho khu vực phát hiện, đảm bảo cường độ của tín hiệu nhận ánh sáng. Tín hiệu nhận ánh sáng được chuyển thành tín hiệu điện thông qua chuyển đổi quang điện và nó được chuyển đến mạch xử lý ở giai đoạn sau. Hình 2 cho thấy sơ đồ của các dạng sóng tín hiệu thu được khi phát hiện các hạt. Vì tín hiệu tán xạ được phát ra theo đường đi của hạt, việc trừ đi một giá trị ngưỡng nhất định sẽ cho phép máy lọc không khí phát hiện đường truyền của hạt.
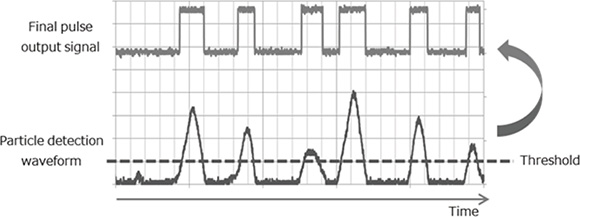
Hình 2: Tín hiệu phát hiện hạt
Đường kính hạt tối thiểu có thể phát hiện phụ thuộc vào mức tỷ lệ S / N. Tín hiệu nhận ánh sáng từ vi hạt không thể phát hiện nếu tỷ lệ S / N thấp. Nói cách khác, tỷ lệ S / N càng cao, các vi hạt có thể được phát hiện càng tốt.
2.2 Bộ phận thu hút hạt trong máy lọc không khí
Một đơn vị cấu tạo quan trọng khác là bộ phận thu hút hạt. Mặc dù nguyên tắc phát hiện hạt đã được mô tả trong Phần 2.1, nhưng chức năng này không thể được thực hiện khi các hạt không đến khu vực phát hiện. Đưa các hạt vào vùng phát hiện một cách thuận lợi là vai trò của bộ phận thu hút hạt trong máy lọc không khí.
Để đưa các hạt vào, cần tạo ra luồng không khí. Các phương pháp tạo ra luồng không khí bao gồm sử dụng quạt, tạo ra sự chênh lệch nhiệt độ trong khí quyển thông qua việc đốt nóng một điện trở.
Tùy thuộc vào ứng dụng mà phương pháp thu hút hạt được áp dụng là khác nhau nhưng các cảm biến phát hiện hạt được tích hợp vào máy lọc không khí gia đình thường là phương pháp gia nhiệt điện trở do chúng có chi phí thấp.
3. Các vấn đề kỹ thuật của máy lọc không khí
Như đã mô tả ở trên, độ chính xác của phép đo vi hạt trong máy lọc không khí phụ thuộc vào nhiều yếu tố khác nhau:
(1) Tăng tỷ lệ S / N để phát hiện chính xác các vi hạt mịn
(2) Tăng dòng chảy để giảm sự thay đổi trong kết quả
Trước đây, các cảm biến nhỏ gọn được tích hợp vào thiết bị điện tử gia đình chịu ảnh hưởng của cả 2 điều kiện (1) và (2). Do đó, độ chính xác phát hiện thấp và kết quả phát hiện thay đổi đáng kể.
Hình 3 là một biểu đồ cho thấy kết quả đo tương quan với dụng cụ đo nồng độ bụi thu được bằng cách đo khói thuốc lá bằng cảm biến thông thường. Chúng ta có thể thấy rằng sự thay đổi là đáng kể và mức độ tương quan là thấp.
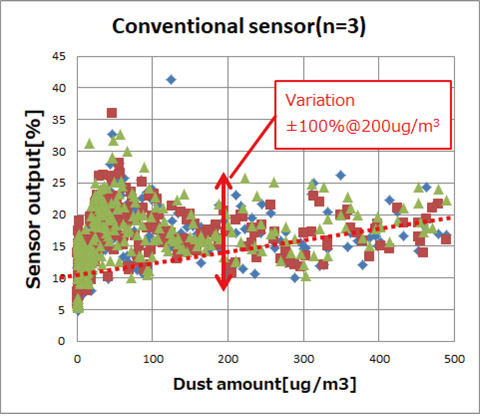
Hình 3: Kết quả đo được thực hiện bằng cảm biến thông thường
Các vấn đề liên quan ở trên (1) và (2) như được mô tả dưới đây.
3.1 Vấn đề liên quan đến việc đảm bảo tỷ lệ S / N
Để nâng cao hiệu suất phát hiện vi hạt của máy lọc không khí, trước tiên cần phải tăng cường độ của tín hiệu tán xạ. Mặc dù cường độ tín hiệu có thể được tăng lên bằng các phương pháp chung như tăng cường độ và độ nhạy đối với ánh sáng chiếu và ánh sáng thu, tăng độ lợi trên mạch, ảnh hưởng của nhiễu cũng tăng lên. Đặc biệt, vì các cảm biến phát hiện cụ thể cần lấy ánh sáng tán xạ mờ nhất từ các vi hạt có kích thước 0,5–1 μm, nên làm thế nào để giảm tín hiệu nhiễu là một vấn đề hết sức quan trọng.
Ngoài ra, không thể tăng kích thước vỏ vì các cảm biến được tích hợp vào thiết bị điện tử gia dụng nên tất cả ánh sáng đi qua khu vực phát hiện đều bị phân tán trong vỏ. Ánh sáng này đến phần tiếp nhận ánh sáng để tạo đầu ra ổn định. Ánh sáng bất ngờ không phải là ánh sáng tín hiệu từ các hạt được gọi là “ánh sáng đi lạc”. Ánh sáng đi lạc này ngăn cản sự gia tăng tỷ lệ S / N như một nguồn nhiễu đáng kể.
3.2 Vấn đề liên quan đến việc đảm bảo dòng chảy vào
Các cảm biến phát hiện hạt của máy lọc không khí dựa trên phương pháp tán xạ ánh sáng phát hiện tín hiệu bằng cách bắt các hạt đi qua khu vực phát hiện một cách ngẫu nhiên. Do đó, sự ổn định của dòng hạt có liên quan rất lớn đến độ chính xác của việc phát hiện bụi.
Các cảm biến được kết hợp vào thiết bị thường có cấu trúc làm nóng điện trở tạo ra dòng không khí trong máy lọc không khí làm cho dòng không khí tăng lên bằng cách sử dụng điện trở lò sưởi rẻ tiền do yêu cầu về chi phí. Trong trường hợp này, điều quan trọng là phải tạo ra một cấu trúc dẫn luồng không khí của dòng không khí đi lên đến khu vực phát hiện một cách hiệu quả.
Theo lý thuyết, tốc độ dòng điện được biểu thị bằng mô hình trong Hình 4. Chúng ta có thể thấy rằng nếu một chất lỏng chảy vào một ống tròn có đường kính a, thì tốc độ dòng điện trung bình tương ứng với bình phương đường kính ống tròn.
- Tốc độ hiện tại trung bình
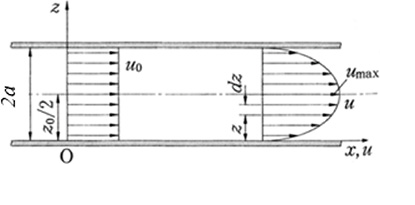
Hình 4: Mô hình tốc độ hiện tại
Vì tốc độ tỷ lệ thuận với dòng chảy trong máy lọc không khí, nên nếu bề mặt tiếp cận giảm kích thước, tốc độ giảm gây ra giảm dòng chảy. Mặt khác, nếu không gian tiếp xúc được mở rộng, thì sự tiếp xúc của bộ cảm biến với dòng chảy tăng lên. Sự đánh đổi này gây khó khăn cho việc đảm bảo dòng khí đi vào máy lọc không khí.
4. Nội dung kỹ thuật của máy lọc không khí
4.1 Giảm tiếng ồn của máy lọc không khí
Đối với bộ cảm biến trong máy lọc không khí, để phát hiện tín hiệu từ các hạt có đường kính 0,5 μm, một vi mạch ảnh có độ nhạy cao (PIC) được sử dụng để tăng cường độ tín hiệu phát hiện. PIC có cấu trúc đơn giản, trong đó một diode quang và mạch khuếch đại dòng điện được đặt trong một con chip. Do đó, độ nhạy của PIC phụ thuộc vào mạch khuếch đại dòng điện bên trong và rất linh hoạt. Tuy nhiên, như đã mô tả ở trên, việc tăng độ nhạy quá nhiều có thể làm tăng ảnh hưởng của “ánh sáng đi lạc” gây ra bão hòa đầu ra của không khí qua máy lọc không khí.
Phương pháp hiệu quả nhất để loại bỏ “ánh sáng đi lạc” là loại trừ sự xuất hiện của chúng với thiết bị cảm biến. Tuy nhiên, vì một lượng đáng kể ánh sáng xung quanh có thể đi vào phần cảm biến nếu hệ thống quang học được định hướng theo hướng mở, các cảm biến thông thường không thể có cấu trúc này để giảm ánh sáng đi lạc. Do đó khó có thể đảm bảo cường độ tín hiệu đủ để máy lọc không khí phát hiện các vi hạt.
Cảm biến này trong máy lọc không khí được thiết kế để có lỗ thoát hạt theo hướng ngược lại với phần tử chiếu sáng có chủ đích để phóng phần lớn ánh sáng đi lạc ra khỏi cảm biến. Cho đến nay, các nhà khoa học đã thành công trong việc dẫn “ánh sáng đi lạc” ra bên ngoài bộ cảm biến đồng thời thúc đẩy phản xạ bằng cách uốn cong phần mở ở một góc nhất định nhưng không đặt nó trên phần mở rộng của đường ánh sáng (Hình 5). Việc áp dụng cấu trúc này cũng tạo ra hiệu ứng triệt nhiễu, ngăn ánh sáng đi vào từ bên ngoài dễ dàng đến phần tiếp nhận ánh sáng của máy lọc không khí (Hình 6).
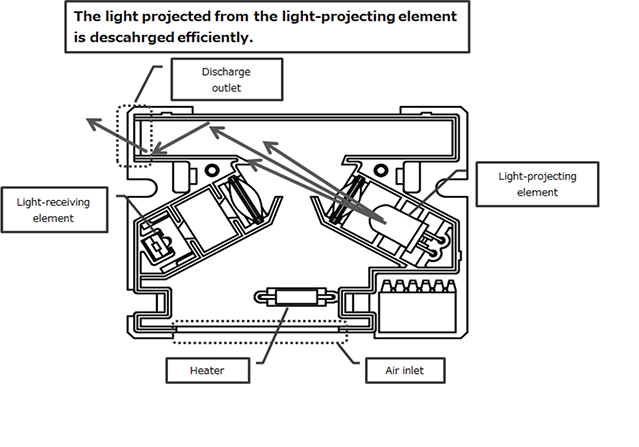
Hình 5. Sơ đồ sự phóng điện của ánh sáng đi lạc
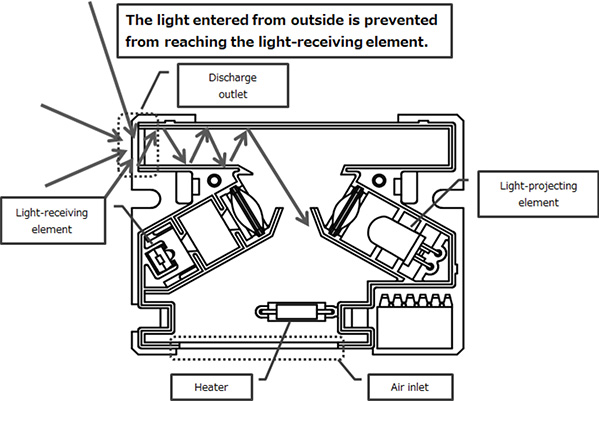
Hình 6: Sơ đồ lối vào của ánh sáng xung quanh
Vì lý do này, các nhà nghiên cứu có thể giảm mức “ánh sáng đi lạc” xuống một phần một hoặc thấp hơn so với các cảm biến thông thường.
Nhiễu điện từ các tín hiệu ánh sáng cũng được nghiên cứu để loại bỏ. Vì nhiễu điện có chứa một lượng đáng kể các thành phần tần số cao nên cần phải lọc sơ bộ một cách hợp lý khi xem xét tần số của tín hiệu phát hiện hạt. Vì cảm biến này sử dụng các dòng không khí tăng được tạo ra bởi sự gia nhiệt bằng điện trở, vận tốc dòng vào của các vi hạt chậm và chúng đi qua vùng phát hiện ở khoảng 100–500 Hz. Do đó, các tín hiệu từ 1 kHz trở lên có thể được coi là nhiễu. Bằng cách lọc sóng cao tần để khuếch đại tần số tín hiệu của vi hạt một cách chọn lọc, có thể đạt được tỷ lệ S / N đủ cho các hạt tiêu chuẩn có đường kính 0,5 μm mà trước đây rất khó phát hiện. Hình 7 cho thấy dạng sóng trước khi lọc sóng tần số cao và Hình 8 cho thấy dạng sóng trong đó các tín hiệu tần số cao bị cắt bởi quá trình xử lý tín hiệu.
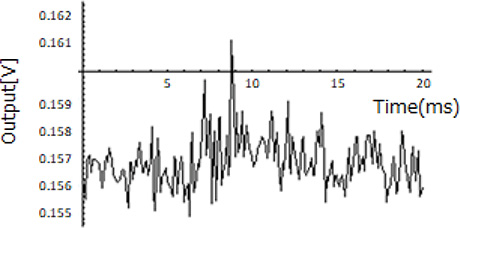
Hình 7. Dạng sóng được phát hiện từ các hạt có đường kính 0,5 μm (trước khi lọc)
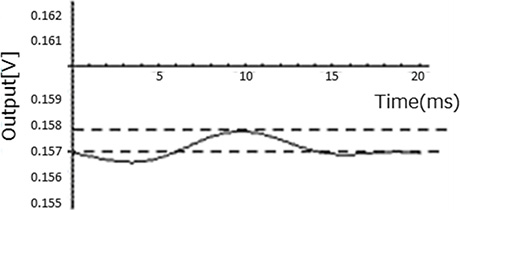
Hình 8. Dạng sóng được phát hiện từ các hạt có đường kính 0,5 μm (sau khi lọc)
4.2 Phương pháp tiếp cận dòng không khí
Như được mô tả trong Phần 3.2, sự tiếp xúc cho đường dẫn dòng chảy càng nhỏ thì tổn thất dòng chảy càng nhỏ. Do đó, một nghiên cứu cách mở rộng không gian trong vùng xử lý đã được thực hiện (Hình 9).

Hình 9: Sơ đồ nghiên cứu về đảm bảo dòng vào (Mở rộng không gian)
Việc mở rộng không gian trong lưu trữ dẫn đến sự tăng dòng chảy vào máy lọc không khí. Tuy nhiên, điều quan trọng không chỉ đơn giản là tăng luồng khí vào mà là làm thế nào để đảm bảo mật độ hạt trong khu vực phát hiện. Do đó, nhà nghiên cứu đã nghĩ đến việc áp dụng một cấu trúc trong đó đường dẫn dòng chảy được thu hẹp về phía phạm vi phát hiện. Điều này nhằm mục đích thu thập các hạt về phía khu vực phát hiện một cách hiệu quả (Hình 10).

Hình 10: Cấu trúc thu gom bụi
Tuy nhiên, việc giảm kích thước của khẩu độ đường dẫn dòng chảy quá nhiều sẽ làm giảm đáng kể dòng chảy trong máy lọc không khí (Hình 11).

Hình 11: Ảnh hưởng của không gian mở
Do đó, hình dạng khẩu độ tối ưu cần được xác định bằng cách sử dụng diện tích mở khẩu độ và luồng vào làm thông số.
Hiệu suất hút bụi được biểu thị bằng tỷ lệ giữa luồng vào và diện tích mở khẩu độ. Đây là dấu hiệu cho biết có bao nhiêu hạt chảy vào khu vực phát hiện.
Thông qua việc đánh giá chỉ số hiệu suất thu gom bụi được thực hiện bằng cách sử dụng một số mô hình, nhà nghiên cứu đã tìm ra một cấu trúc tối ưu và đạt được hiệu suất phát hiện cao hơn sáu lần so với các cảm biến thông thường (Hình 12).

Bảng 1. Nghiên cứu hiệu suất thu gom bụi trong máy lọc không khí
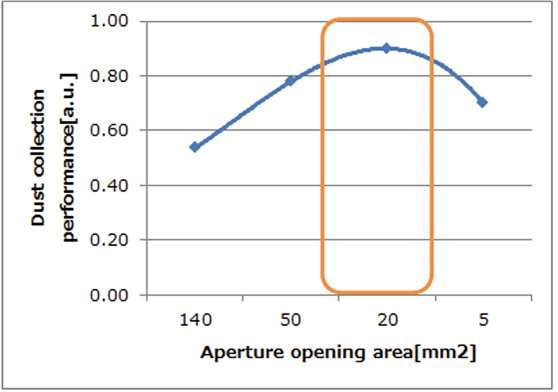
Hình 12: Hiệu suất hút bụi và khu vực mở
Cấu trúc này được gọi là cấu trúc kết hợp thực hiện cả chức năng “đảm bảo dòng vào” và “hút bụi” bằng cách tạo thành cấu trúc hút bụi hình phễu, trong đó không gian gần cửa hút gió của máy lọc không khí được mở rộng (Hình 13)

Hình 13: Mô phỏng cấu trúc đường dẫn dòng hoàn chỉnh
Ngoài ra, cấu trúc thu gom bụi được đặc trưng bởi việc thực hiện đồng thời sự tích hợp của hình dạng quang học và đường dẫn dòng, giảm kích thước do sử dụng hình dạng quang học của ánh sáng chiếu và nhận trong máy lọc không khí. Cấu trúc nâng cao cả đường dẫn dòng và chức năng quang học vì thay đổi góc côn của hình dạng phễu theo hai giai đoạn làm giảm lực cản, ngăn cản dòng chất lỏng cũng như thực hiện chức năng ngăn chặn ánh sáng đi lạc về mặt quang học (Hình 14).
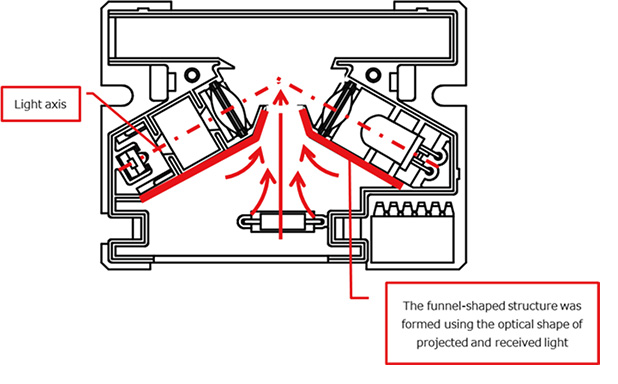
Hình 14: Máy lọc không khí sử dụng hình dạng quang học để tăng hiệu quả nhận diện bụi
Để đánh giá hiệu quả của phương pháp, nhóm nghiên cứu thực hiện so sánh số lượng hạt được phát hiện bằng cách sử dụng máy đếm hạt. Hình 15 cho thấy số lượng các hạt được phát hiện tăng mạnh so với các sản phẩm máy lọc không khí thông thường.
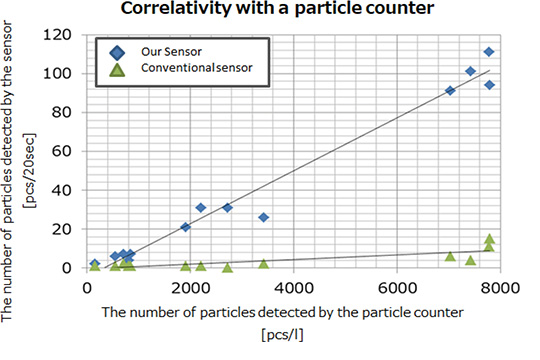
Hình 15: So sánh số lượng hạt được phát hiện
5. Hiệu lực
Hiệu quả của giải pháp đã được chứng thực bằng quá trình đo lường trong môi trường có mật độ khói thuốc lá cao, trong một không gian kín để xác nhận mối tương quan của sự dao động đầu ra cảm biến với dụng cụ đo nồng độ bụi được sử dụng (Hình 16). Kết quả là, nồng độ bụi trong môi trường khói thuốc lá sử dụng bộ cảm biến mới đã giảm xuống +/− 15% trong khi với bộ cảm biến thông thường, hiệu quả là +/− 100%.
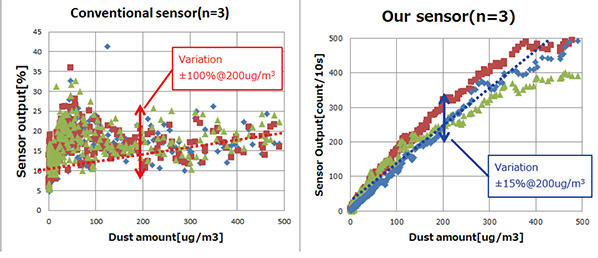
Hình 16: So sánh hiệu suất phát hiện thuốc lá của bộ cảm biến cũ và mới
Các nhà nghiên cứu cũng đánh giá hiệu suất làm việc của bộ cảm biến mới của máy lọc không khí trong môi trường công cộng với PM2.5 bị tán xạ. Hình 17 là biểu đồ thể hiện kết quả xác nhận mối tương quan giữa số lượng các hạt được phát hiện bởi cảm biến mới (Đường màu xanh lam) với kết quả đo PM2.5 bằng hệ thống giám sát ô nhiễm không khí Soramame-kun được lắp đặt tại mỗi tỉnh (Vạch kẻ màu đỏ). Phép đo được tiến hành tại thành phố Ichinomiya, tỉnh Aichi trong tám ngày với mục đích theo dõi sự tăng / giảm của PM2.5, hệ số tương quan là 0,79.

Hình 17: Xác minh mối tương quan với Soramame-kuns
6. Kết luận
Là một cảm biến phát hiện vi hạt mới thiết bị có thể phát hiện các vi hạt có đường kính nhỏ đến 0,5 μm với độ chính xác cao hơn nhiều so với các cảm biến thông thường về phép đo trong không khí, bằng cách kết hợp hình dạng quang học mới với cấu trúc đường dẫn dòng mới.
Mối quan tâm ngày càng tăng về PM2.5, nhu cầu về cảm biến phát hiện hạt đang tăng lên. Việc tích hợp thiết bị này trong máy lọc không khí cho phép giám sát liên tục từ đó đề xuất giải pháp xử lý không khí hiệu quả. Trong tương lai, để đáp ứng nhu cầu sử dụng của khách hàng, nhóm nghiên cứu cam kết tiếp tục phát triển các cảm biến nhỏ hơn có thể được kết hợp với nhiều dòng sản phẩm.
Nếu quý khách hàng cần hướng dẫn chi tiết hoặc tư vấn mua máy lọc không khí hãy liên hệ với chúng tôi thông qua webiste: Xulykhoibui.com hoặc gọi điện trực tiếp cho chúng tôi thông qua số Hotline: 0901.856.888 để được nhân viên của chúng tôi tư vấn và hỗ trợ đặt đơn nhanh chóng nhất!
Bài viết khác

Khí thải NOx là gì có độc không, tác hại của khí NOx là gì, phân biệt với khí NOS là gì? NOx là loại khí thải khá phổ biến trong các hoạt động sản xuất công nghiệp. Sau đây chúng ta cùng tìm hiểu về các phương pháp xử lý khí thải NOx hiệu

Máy CNC router đã cách mạng hóa ngành sản xuất, nhưng đi kèm với đó là thách thức về bụi và khói. Bài viết này sẽ phân tích các chất thải này và tầm quan trọng của hệ thống hút, đặc biệt là máy hút khói máy CNC router, để đảm bảo một môi trường làm việc an toàn và năng suất.

Hàn dưới lớp thuốc (SAW) thường được xem là phương pháp an toàn với ít khói. Tuy nhiên, đằng sau vẻ ngoài tĩnh lặng đó là những nguy cơ tiềm ẩn từ khói ẩn và kim loại nặng. Bài viết này sẽ đi sâu vào các mối đe dọa này và tầm quan trọng của việc sử dụng Máy hút khói hàn dưới flux để đảm bảo an toàn cho người lao động.

